FlightBox Pro Is Back!
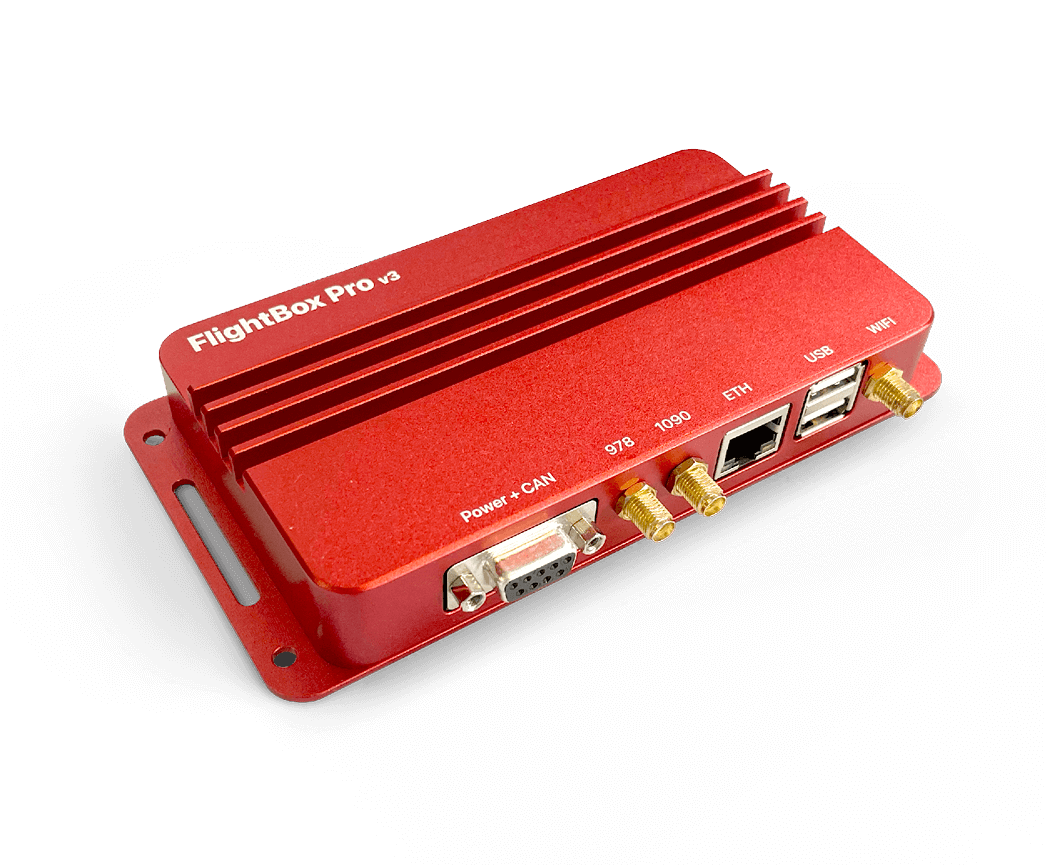
After more than two years the FlightBox Pro ADS-B receiver is back, and better than ever. FlightBox Pro is a dual-band (1090 ES and 978 UAT) ADS-B receiver with WAAS GPS, AHRS, and barometric altimeter. It works with most EFB applications including ForeFlight, iFly GPS, FlyQ EFB, WingX Pro, FltPlanGo. Best of all, it is […]
Kitplanes FlightView Update Video

Marc Cook with Kitplanes stopped by our AirVenture booth for an update on FlightView. Here’s a link to his video. (Apologies in advance for my terrible acting skills.)
AirVenture 2023 Show Special

This week is AirVenture (Oshkosh) and that means it’s time for our annual show special! Save 10% on all FlightView system kits: FlightView Lite – $2500 $2250 FlightView Core – $3000 $2700 FlightView Ready-To-Fly Single Screen – $4000 $3800 FlightView Ready-To-Fly Dual Screen – $5000 $4500 FlightView Ready-To-Fly Three Screen – $6000 $5400 Use the […]
FlightView Gets A Huge Upgrade – FDC v3

Falken Avionics is pleased to introduce the third generation of our Flight Data Computer (FDC), a major upgrade that takes the FlightView EFIS to a whole new level. What’s an FDC? For those who are not familiar with FlightView, the FDC is the core computer system. It serves as the central hub, collecting data from […]
Keep Cool and Fly On with Falken TEC
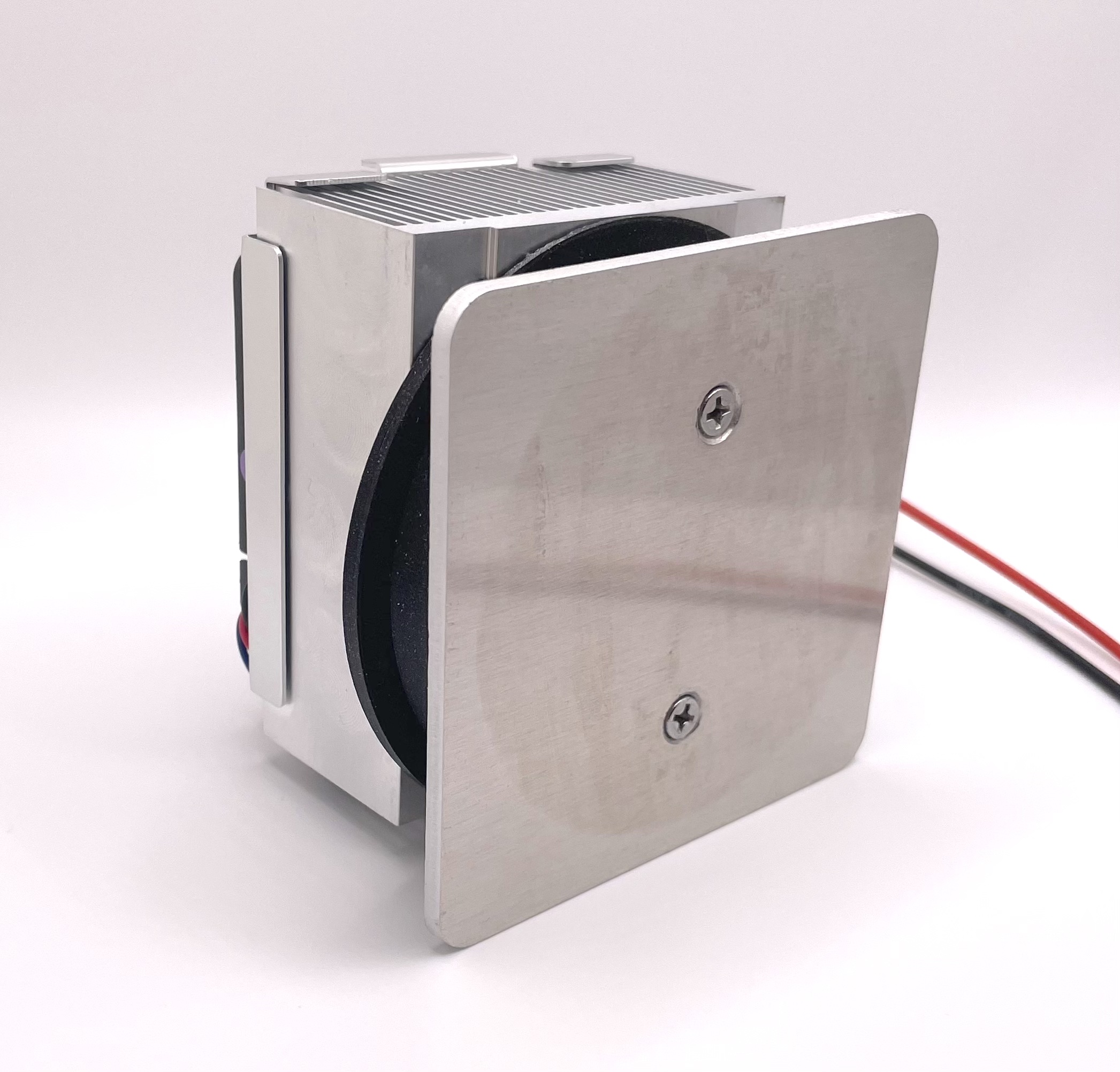
We’re based in Austin, Texas. Texas is hot. Really hot. How hot? Today it got up to 106° F. Yesterday it got up to 108° F. So yeah, hot. If you’re at all familiar with iPads, you know that heat is their kryptonite. Above a certain temperature they start to throttle the CPU cores and […]
See What’s New At AirVenture 2023
AirVenture 2023 kicks off at Whitman airport in beautiful Oshkosh, Wisconsin in less that two weeks! Falken Avionics is launching several fantastic new products at the show, so please come by and see what’s new. You can find us in Hangar A (the Aircraft Spruce hangar) on Aisle E in booth 1043 – that’s at […]
Now Shipping: FlightDock mini
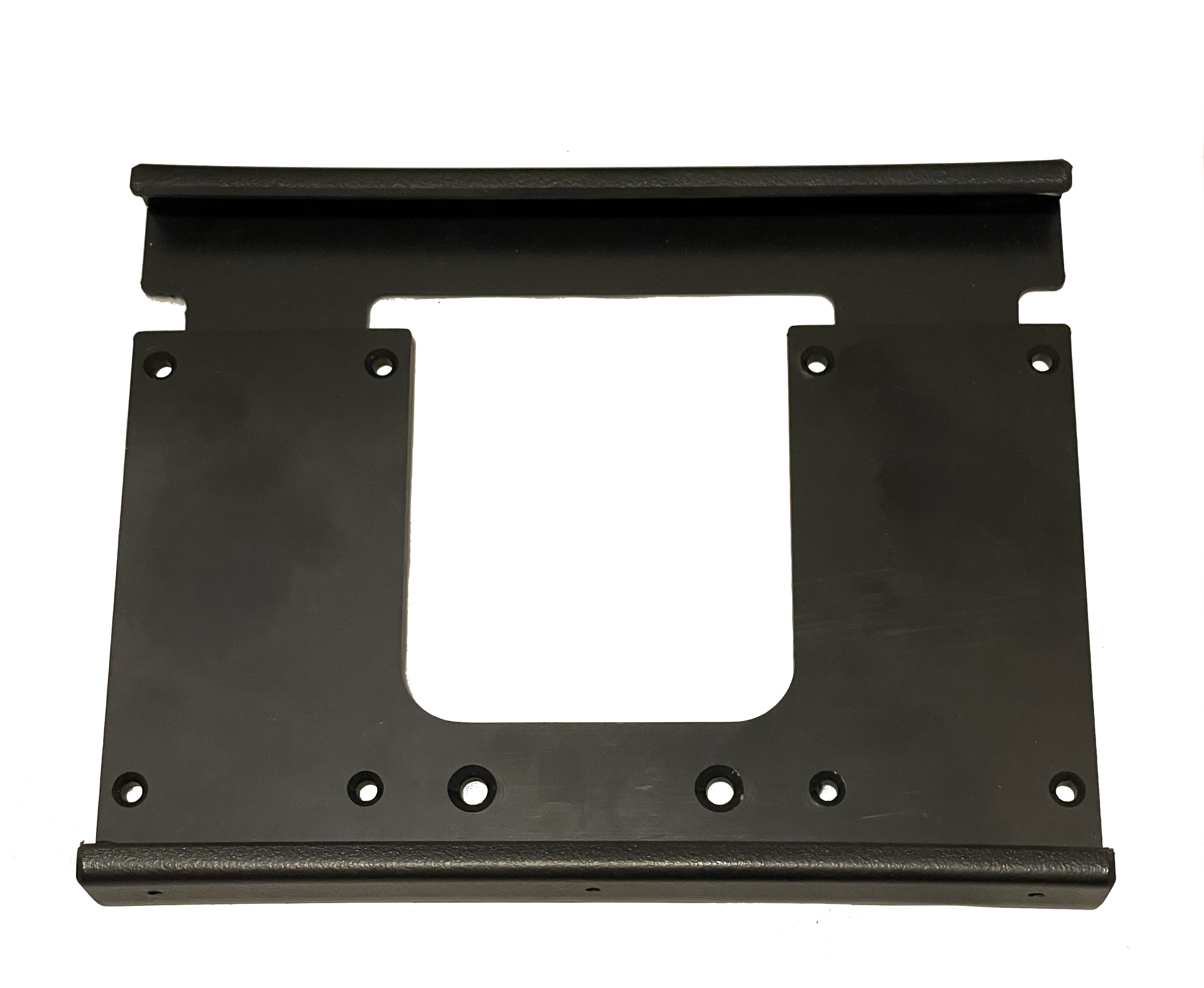
Introducing the all-new FlightDock mini, the latest addition to Falken Avionics’ lineup of premium aviation accessories. Built with the same attention to detail and quality that our customers have come to expect, the FlightDock mini is the perfect solution for pilots who prefer smaller tablets in the cockpit. Designed specifically for the 7″ iPad mini […]
No Room For FlightBar? Check Out FlightStick

One of the things that really distinguishes FlightView from other iPad-based EFIS* is our FlightBar – a wireless controller that adds a set of “hard” knobs and buttons to the system. Touch screens are great – on the ground. In the air, it’s generally best to have something a bit more tactile. FlightBar allows the […]
USB Motion Isolator – Now Available

A few weeks back I posted about a potential new product designed to make USB a bit more reliable in high vibration environments by mechanically isolating the hub, cable, and plug / dongle. Well, it took a couple of iterations to get the spacing exactly right, but I now have a design that fits the […]
A Better USB Hub for Aviation and Industrial Applications

USB (short for Universal Serial Bus) is a great standard – it allows virtually any device to talk to any other device over a very fast connection. An enormous number of peripheral devices can be connected using simple and inexpensive hubs. Unfortunately, USB connectors were designed for the office, not the cockpit. Aircraft vibration can, […]