New iPad Options For FlightView

TL;DR – Apple released a new base model iPad and it should make a perfect, and cheaper, FlightView display. From the product launch page: On Tuesday, October 18 Apple launched a new (and somewhat more expensive) base-model iPad and a new set of iPad Pros. I have yet to try any of these out, but […]
New Look for Falken
So after a few years of what a friend referred to as “programmer art”, we’ve finally upped our web game. The new site does a much better job of showcasing what FlightView is and does. A huge shout-out to Selma Filipovic from SF Design who took a bunch of functional but boring text, screen shots, […]
New FlightView Training Video
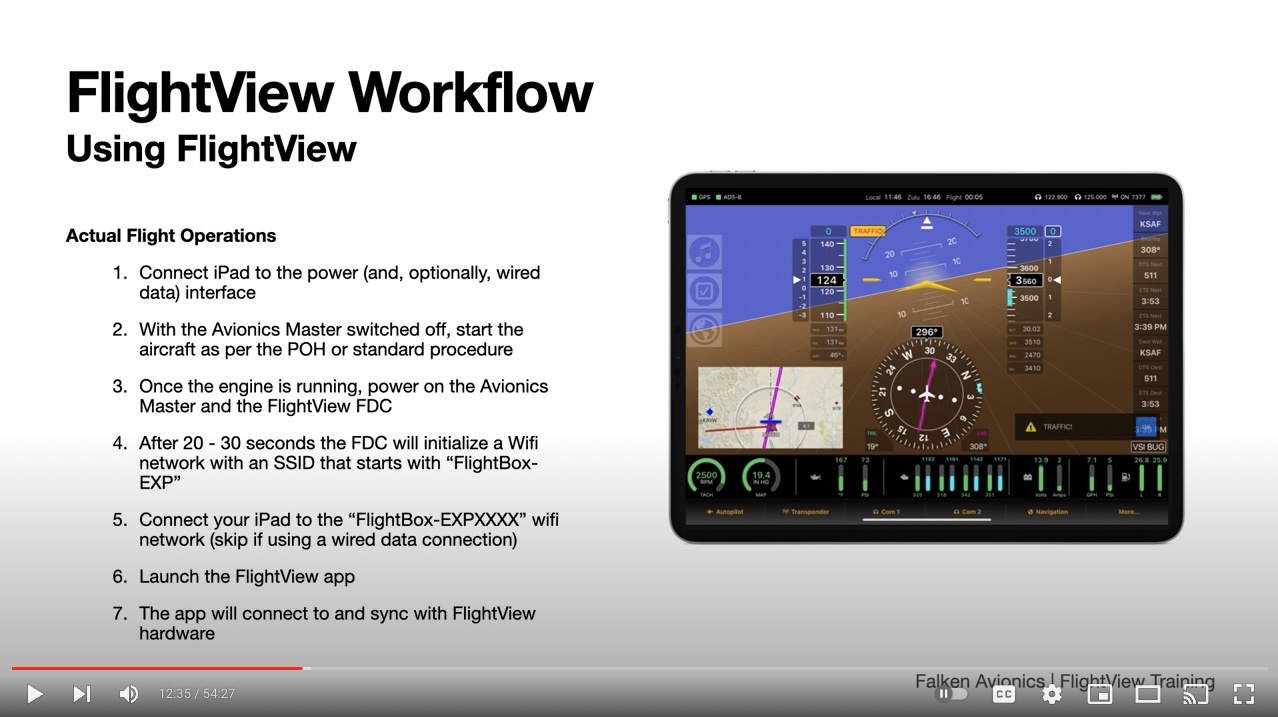
So here is a new 55 minute monster training video covering all things FlightView App. We start off with a quick review of what FlightView is and does, then take a brief look at the architecture. Next we walk through the process of installing the app on an iPad. Then we dive deep on the […]
RNAV (GPS) Approach Plates and Airport Diagrams
Version 3.0 of the FlightView system adds FAA RNAV (GPS) approach plates, airport diagrams, and approach procedures to the FlightView MFD and navigation system. These are currently considered experimental features as there are a few key functions (missed approaches, procedure turns, holds) that are still under development. While this is still “experimental” we’re offering the […]
2022 Show Specials
We’re running AirVenture 2022 show special pricing through August 15 on the following: Save $100 on the FlightView Lite kit – regular price $1750, show special $1650 Save $200 on the FlightView Core kit – regular price $2500, show special $2300 Save $300 on the FlightView Ready-To-Fly kit – regular price $3500, show special $3200 […]
AirVenture 2022
So first, the obligatory picture of this year’s booth: I shot this during one of the very few moments when there wasn’t a crowd of enthusiastic homebuilders crowded in and asking for a demo. Over the course of the week we gave more than 150 demos and talked with more than 400 builders. As always, […]
FlightView Firmware v3: Core Improvements
Last year at Oshkosh I demo’d a new version of the firmware for FlightView that radically improved system performance and helped guarantee system stability. At the time, I figured the new code would be ready within a few weeks. A few months at the outside. Well…. I’m happy to announce that version 3.0 is now […]
FlightView on Kitplanes
Marc Cook from Kitplanes Magazine dropped by on Friday and shot a quick video on FlightView. Check it out here.
FlightView In The App Store!
I’m very happy to announce that the FlightView app is now available in the Apple App Store! To install it, go to the App Store on your iPad and search for “FlightView EFIS” or click this link.
Oshkosh 2021 – See You There!
EAA AirVenture 2021 (aka “Oshkosh”) is only a month away. I’m very happy to announce that Falken Avionics will be exhibiting and I will be presenting a Forum on FlightView. We will be back in the same booth location as 2019 – Hangar A, Aisle E, Booth 1043. If you’re able to make it to […]